Basiseinstellungen & Zielpunkt definieren
Ein Wegpunkt stellt die Definition einer Bewegung des Roboters in eine bestimmte Stellung bzw. zu einem bestimmten Zielpunkt dar. Es werden u. a. Geschwindigkeit, Art der Bewegung, Toleranzen (Überschleifen) und Zielpunkt des Roboters festgelegt. Der Zielpunkt definiert die gewünschte Pose (Stellung) des Roboters.
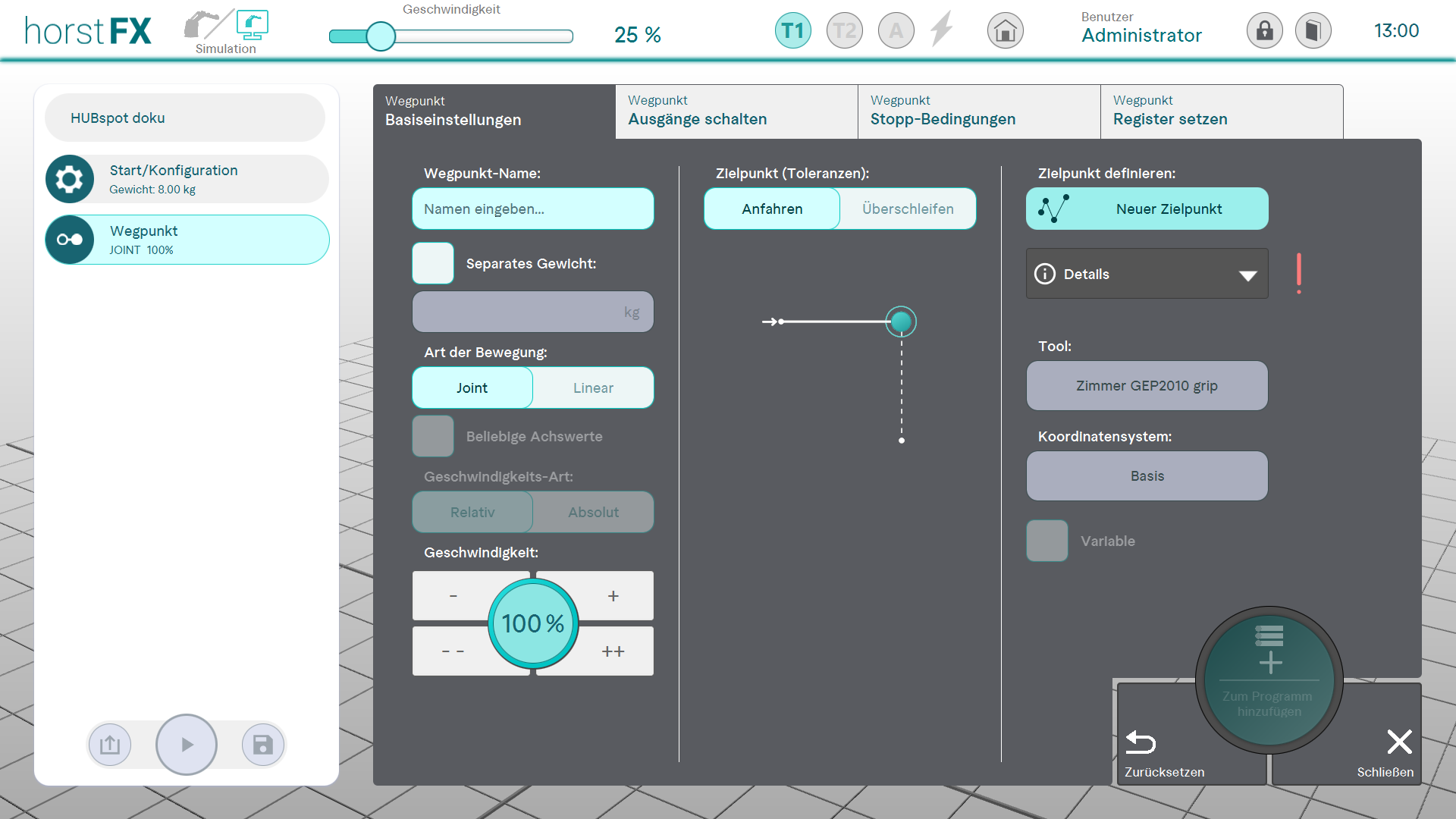
Das Definieren des Zielpunkts erfolgt analog zum Freien Fahren
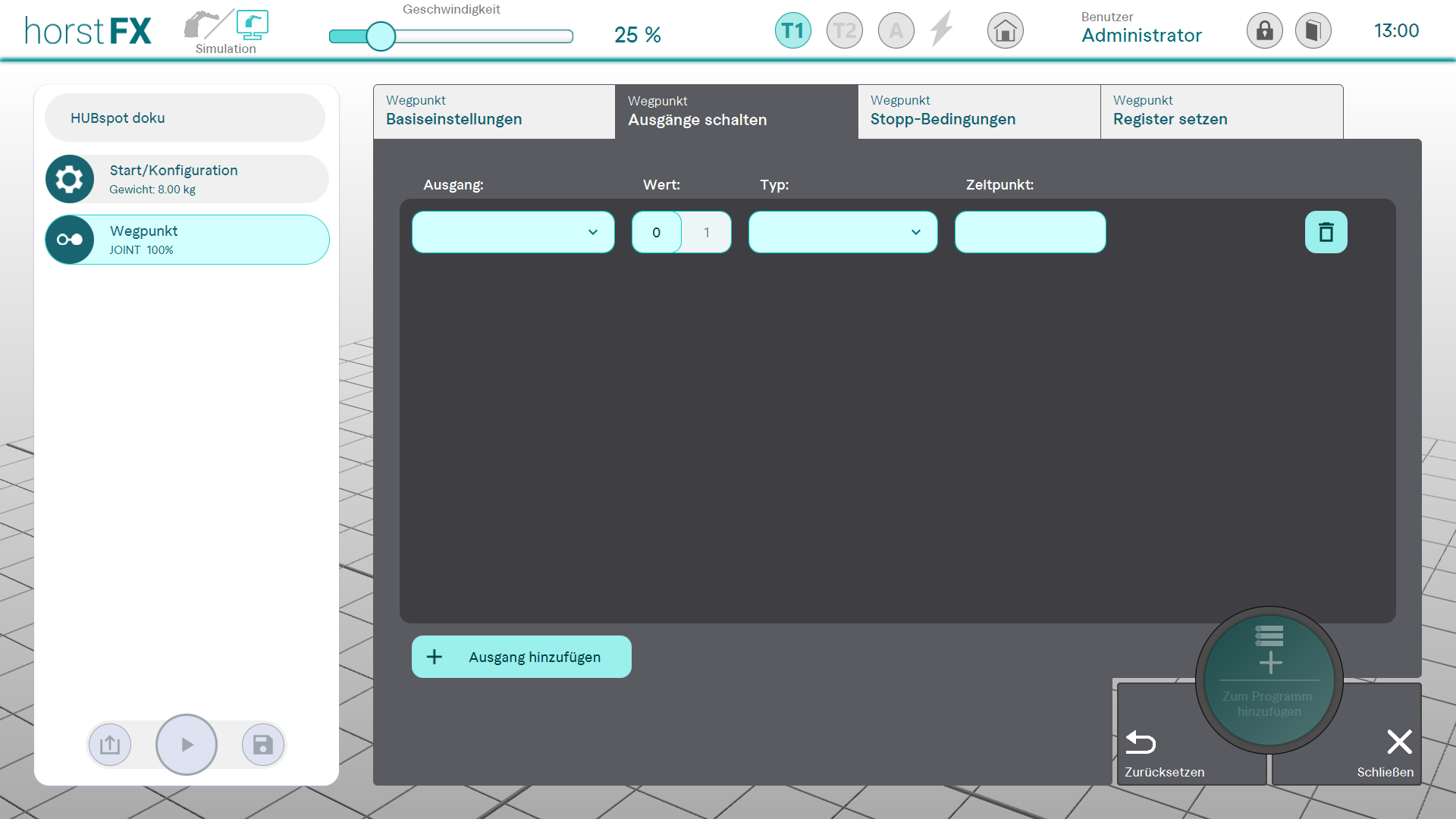
Ausgänge schalten
Es ist möglich beliebig viele Ausgänge während des Anfahrens eines Wegpunktes zu schalten. Für den Zeitpunkt des Schaltens gibt es zwei Möglichkeiten:
- Pfaddauer
Legt fest nach welcher prozentual vergangenen Zeit der Ausgang geschaltet wird. Die Zeit bezieht sich auf die komplette Bewegung inklusive Beschleunigen und Abbremsen des Roboters. - Zeitliche Verzögerung
Legt fest nach wie vielen Millisekunden ab Beginn des Anfahrens des Wegpunktes der Ausgang geschaltet wird. Ist der Wert höher als die komplette Bewegung an sich dauert, wird am Ende der Bewegung so lange gewartet, bis der zeitliche Wert erreicht ist und erst dann der Ausgang geschaltet.
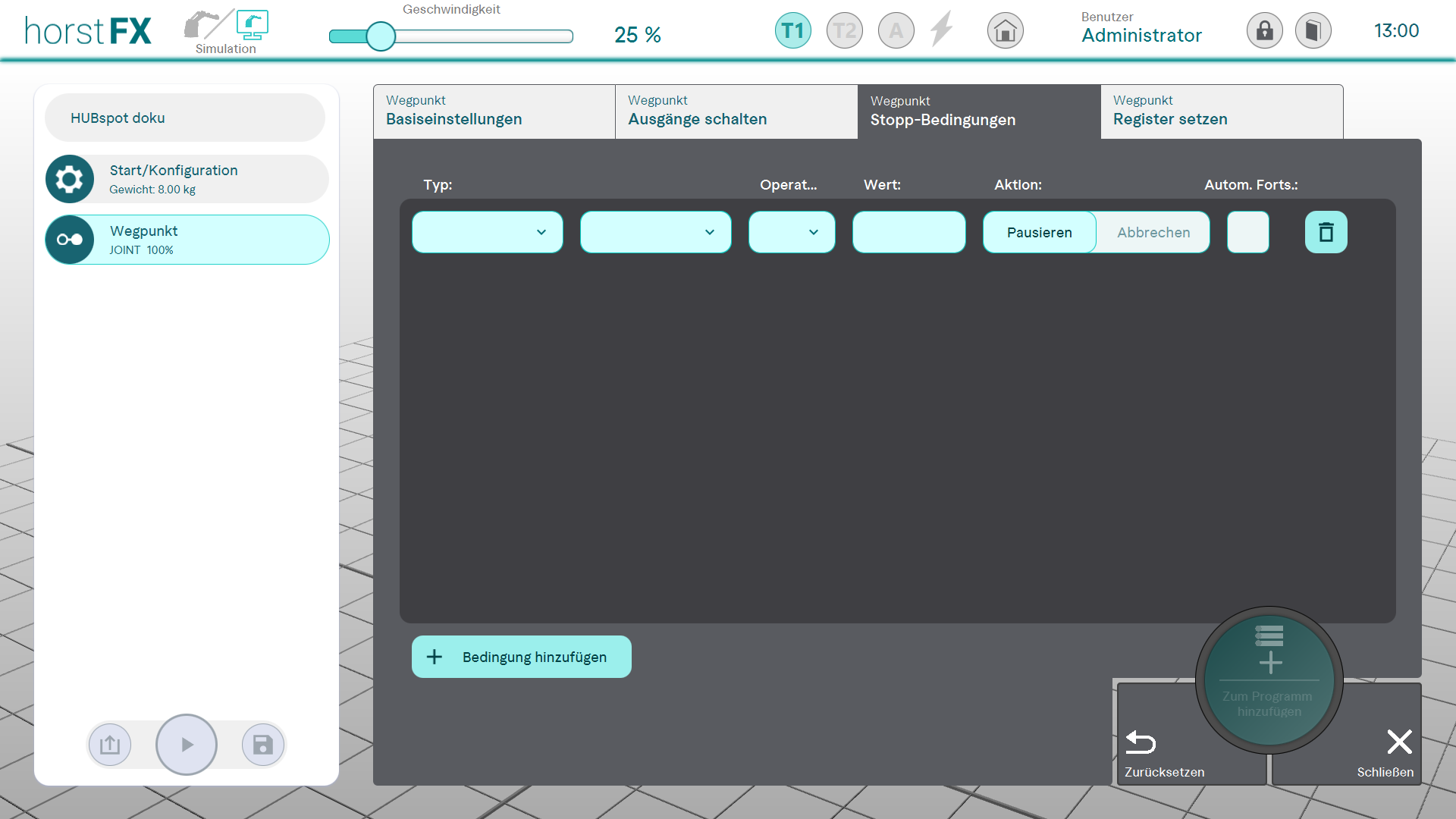
Stopp-Bedingungen
Durch Stopp-Bedingungen können Bewegungen zu einem Wegpunkt pausiert oder abgebrochen werden, sobald eine bestimmte Bedingung eintrifft. Für jede Aktion Wegpunkt können beliebig viele Stopp-Bedingungen definiert werden.
Es gibt 3 Arten von Stopp-Bedingungen:
- Pausieren
Das Programm pausiert und es erscheint ein entsprechendes Pop-up. Das Pop-up kann nur bestätigt werden, wenn die Abbruchbedingung nicht mehr erfüllt ist. Danach fährt das Programm weiter. - Pausieren mit automatischen Fortsetzen
Wird der Haken in der Checkbox gesetzt, wird das Programm ohne die manuelle Bestätigung weiter fortgeführt. - Abbrechen
Die aktuelle Bewegung wird abgebrochen und es wird mit der nächsten Bewegung fortgefahren.
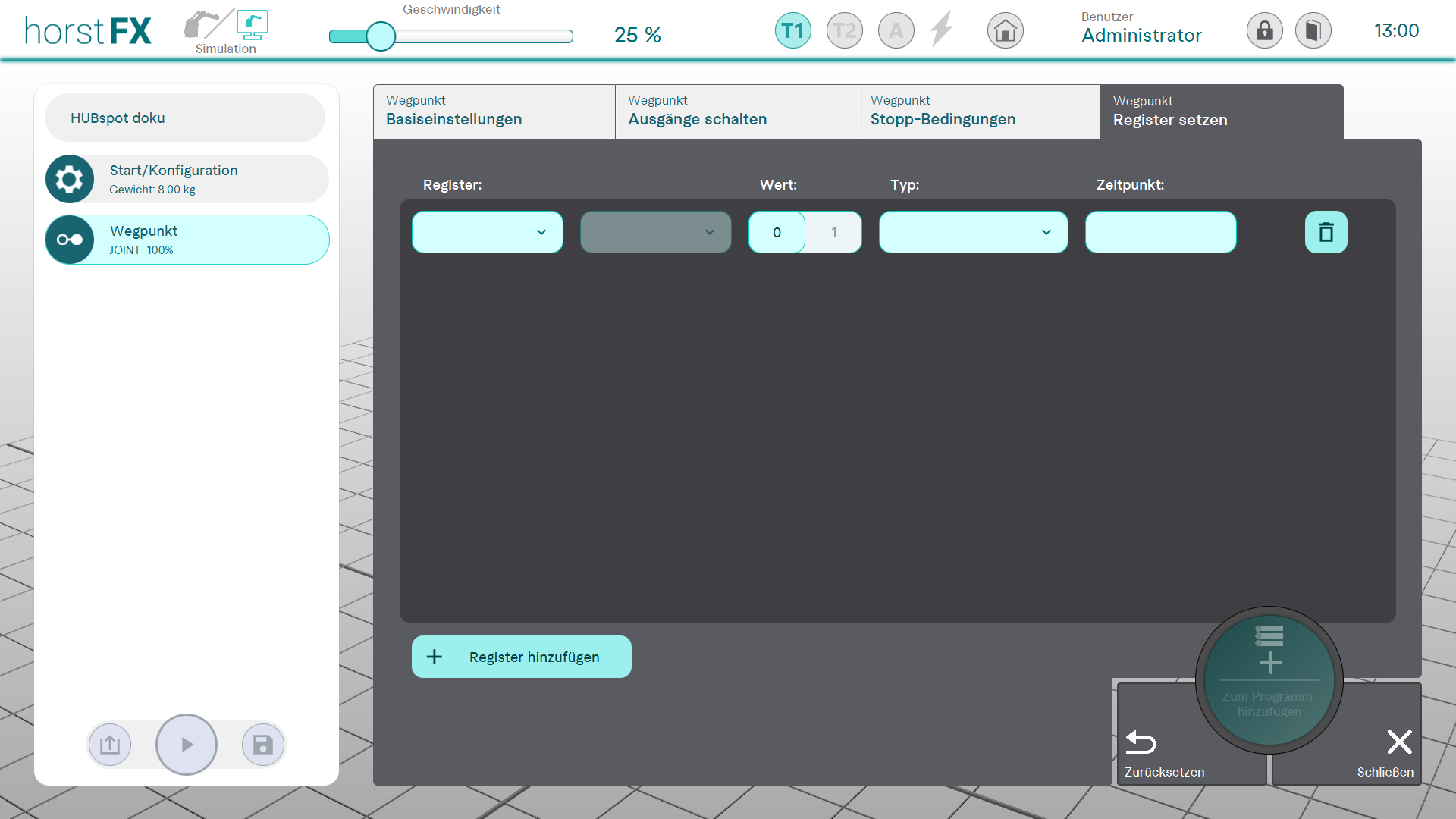
Register setzen
In diesem Teil der Einstellungen können während des Anfahrens eines Wegpunktes Register gesetzt werden. Das bedeutet, dass Werte zu einem bestimmten Zeitpunkt während der Bewegung des Roboters in ein Register gesetzt werden können. Für jede Aktion Wegpunkt können beliebig viele Register gesetzt werden.
Für das Setzen eines Registers gibt es zwei Möglichkeiten:
- Pfaddauer
Legt fest nach welcher prozentual vergangenen Zeit der Registerwert gesetzt wird. Die Zeit bezieht sich auf die komplette Bewegung inklusive Beschleunigen und Abbremsen des Roboters. - Zeitliche Verzögerung
Legt fest nach wie vielen Millisekunden ab Beginn des Anfahrens des Wegpunktes der Registerwert gesetzt wird. Ist der Wert höher als die komplette Bewegung an sich dauert, wird am Ende der Bewegung so lange gewartet, bis der zeitliche Wert erreicht ist und der Registerwert wird gesetzt.