Im Aktionsfenster Start/Konfiguration können programmweite Einstellungen getroffen werden.
Reiter 1 Tools und Koordinatensysteme
Hier können beliebig viele erstellte Tools und Koordinatensysteme dem Programm hinzugefügt werden, auf welche dann bei den entsprechenden Aktionen zugegriffen werden kann.
Das erste Tool hat eine Sonderrolle, da das Programm immer mit diesem Tool gestartet wird. Das heißt, dass Wegpunkte, die kein festes Tool hinterlegt haben, solange mit diesem Tool angefahren werden, bis über die ###Aktion Tool wechseln ein anderes Tool als aktives Tool definiert wird. Alle hier definierten Tools können an Wegpunkten hinterlegt werden.
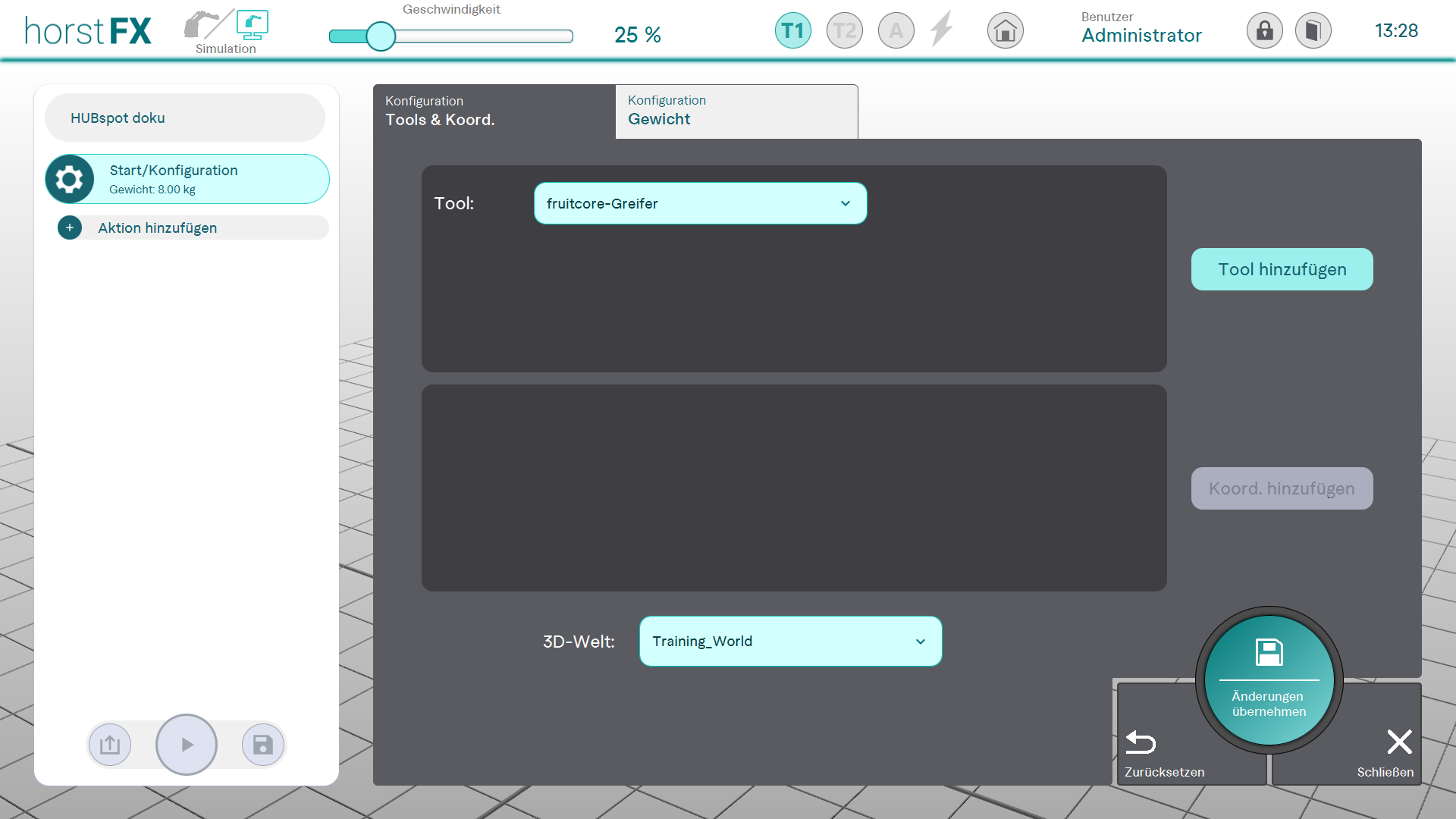
Außerdem kann die 3D-Welt des Programms festgelegt werden
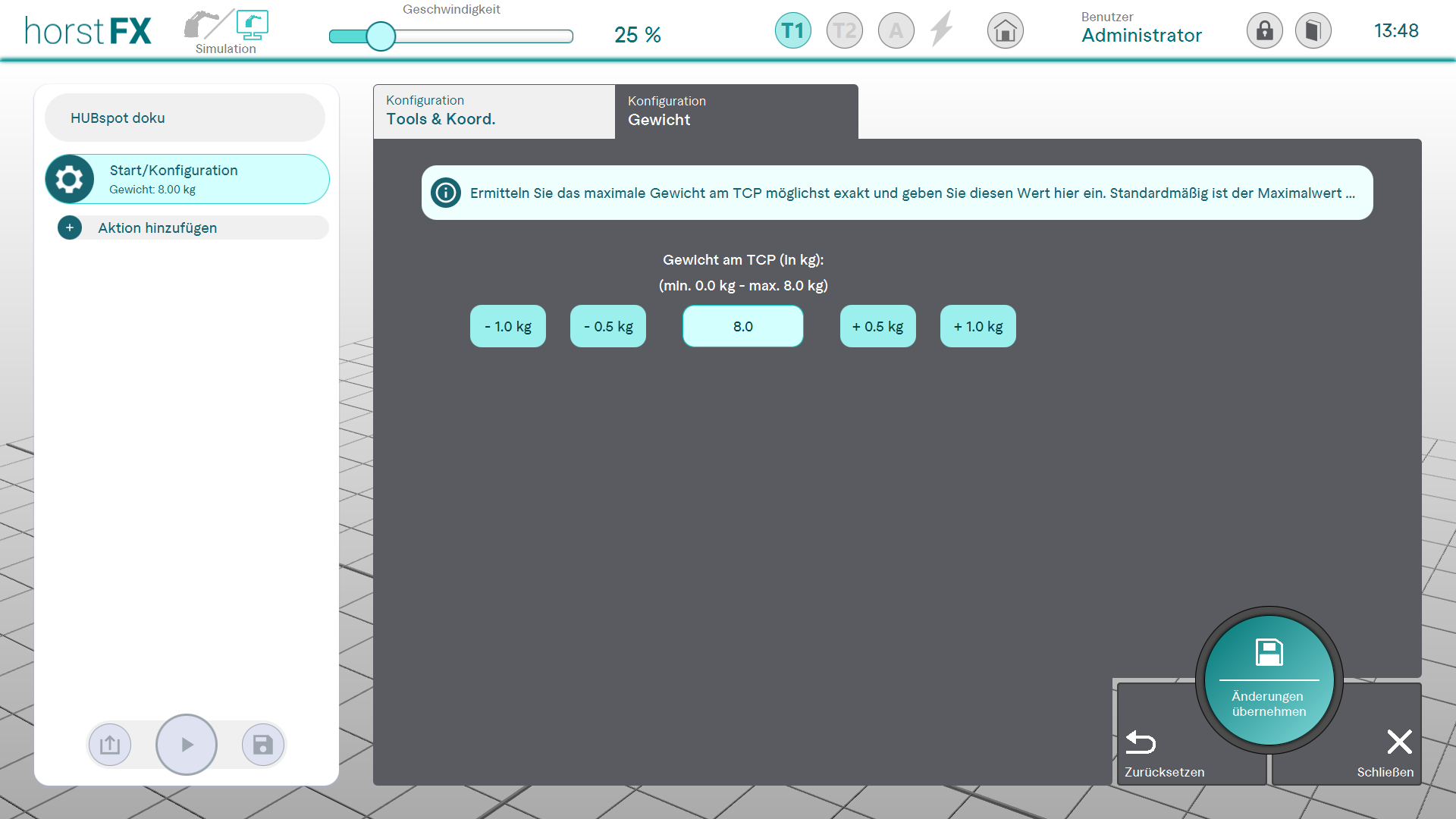
Reiter 2 - Gewicht
Das hier konfigurierte Gewicht am Roboterflansch (Werkzeug + Werkstück) gilt programmweit für alle Aktionen Wegpunkt und Relativer Wegpunkt, es sei denn, es wird von einer Aktion Gewicht ändern überschrieben oder in einer Aktion Wegpunkt oder Relativer Wegpunkt ist ein separates Gewicht konfiguriert.
ACHTUNG!
Das maximale Gewicht am TCP sollte möglichst exakt ermittelt hier eingestellt werden. Bei zu geringer Gewichtsangabe wird der Roboter außerhalb der Spezifikation betrieben. Dies kann zu erhöhtem Verschleiß und eventuell zu Schrittverlusten und somit zur Schädigung des Systems führen. Das Betreiben des Roboters außerhalb der Spezifikation führt zum Verlust der Gewährleistung.