Basiseinstellungen & Zielpunkt definieren
Ein Wegpunkt stellt die Definition einer Bewegung des Roboters in eine bestimmte Stellung bzw. zu einem bestimmten Zielpunkt dar. Es werden u. a. Geschwindigkeit, Art der Bewegung, Toleranzen (�berschleifen) und Zielpunkt des Roboters festgelegt. Der Zielpunkt definiert die gew�nschte Pose (Stellung) des Roboters.
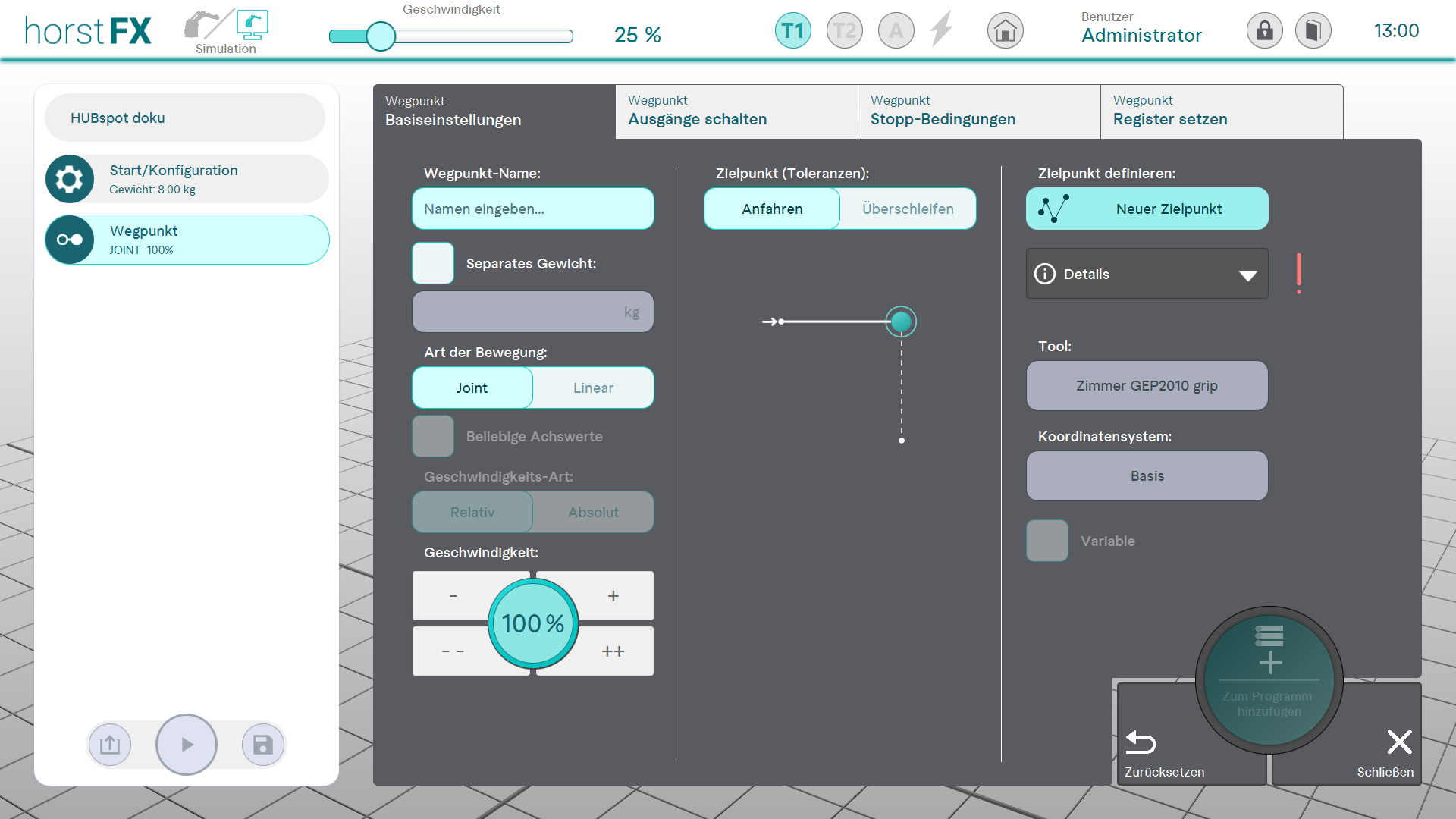
Das Definieren des Zielpunkts erfolgt analog zum Freien Fahren
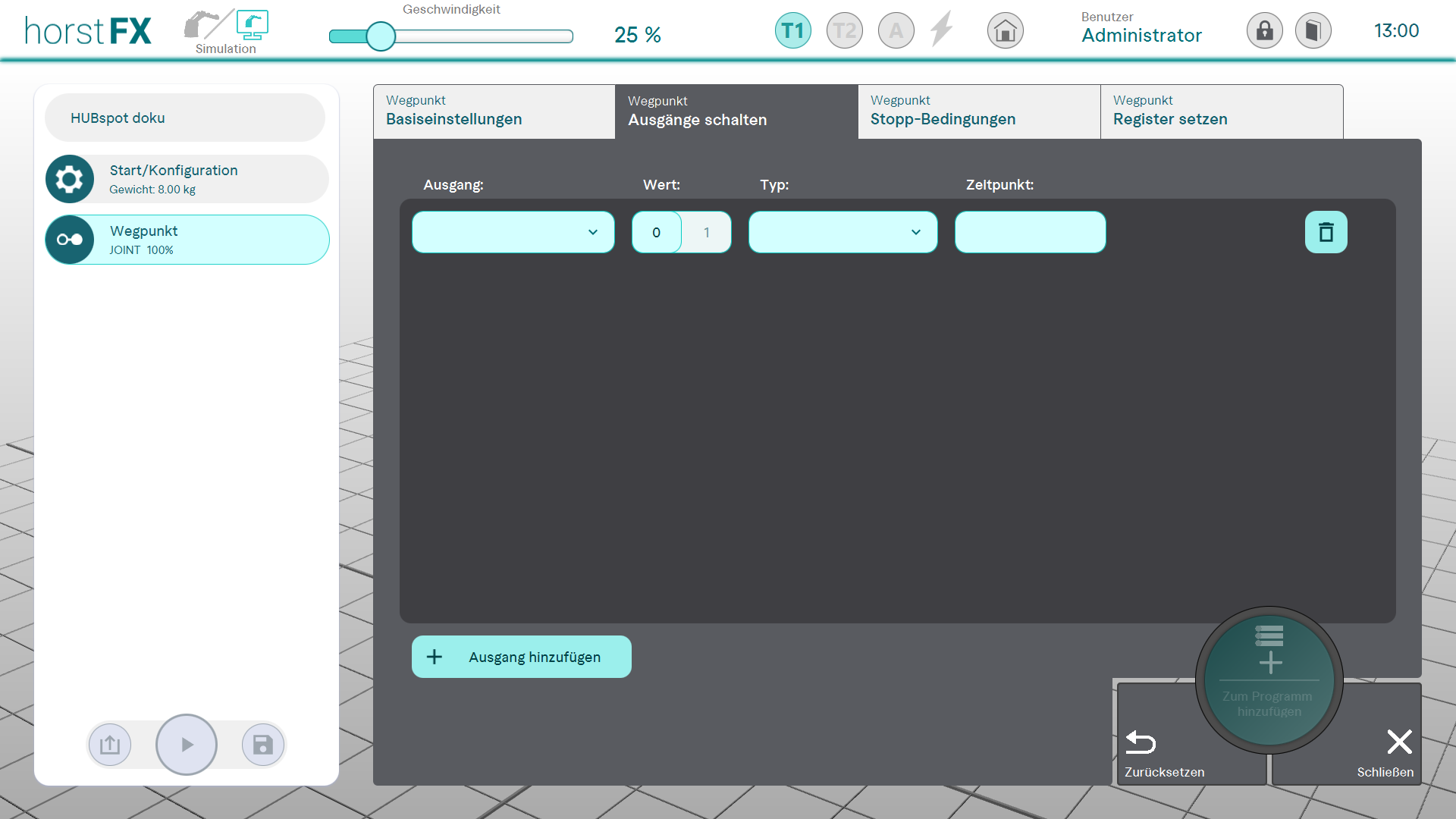
Ausg�nge schalten
Es ist m�glich beliebig viele Ausg�nge w�hrend des Anfahrens eines Wegpunktes zu schalten. F�r den Zeitpunkt des Schaltens gibt es zwei M�glichkeiten:
- Pfaddauer
Legt fest nach welcher prozentual vergangenen Zeit der Ausgang geschaltet wird. Die Zeit bezieht sich auf die komplette Bewegung inklusive Beschleunigen und Abbremsen des Roboters. - Zeitliche Verz�gerung
Legt fest nach wie vielen Millisekunden ab Beginn des Anfahrens des Wegpunktes der Ausgang geschaltet wird. Ist der Wert h�her als die komplette Bewegung an sich dauert, wird am Ende der Bewegung so lange gewartet, bis der zeitliche Wert erreicht ist und erst dann der Ausgang geschaltet.
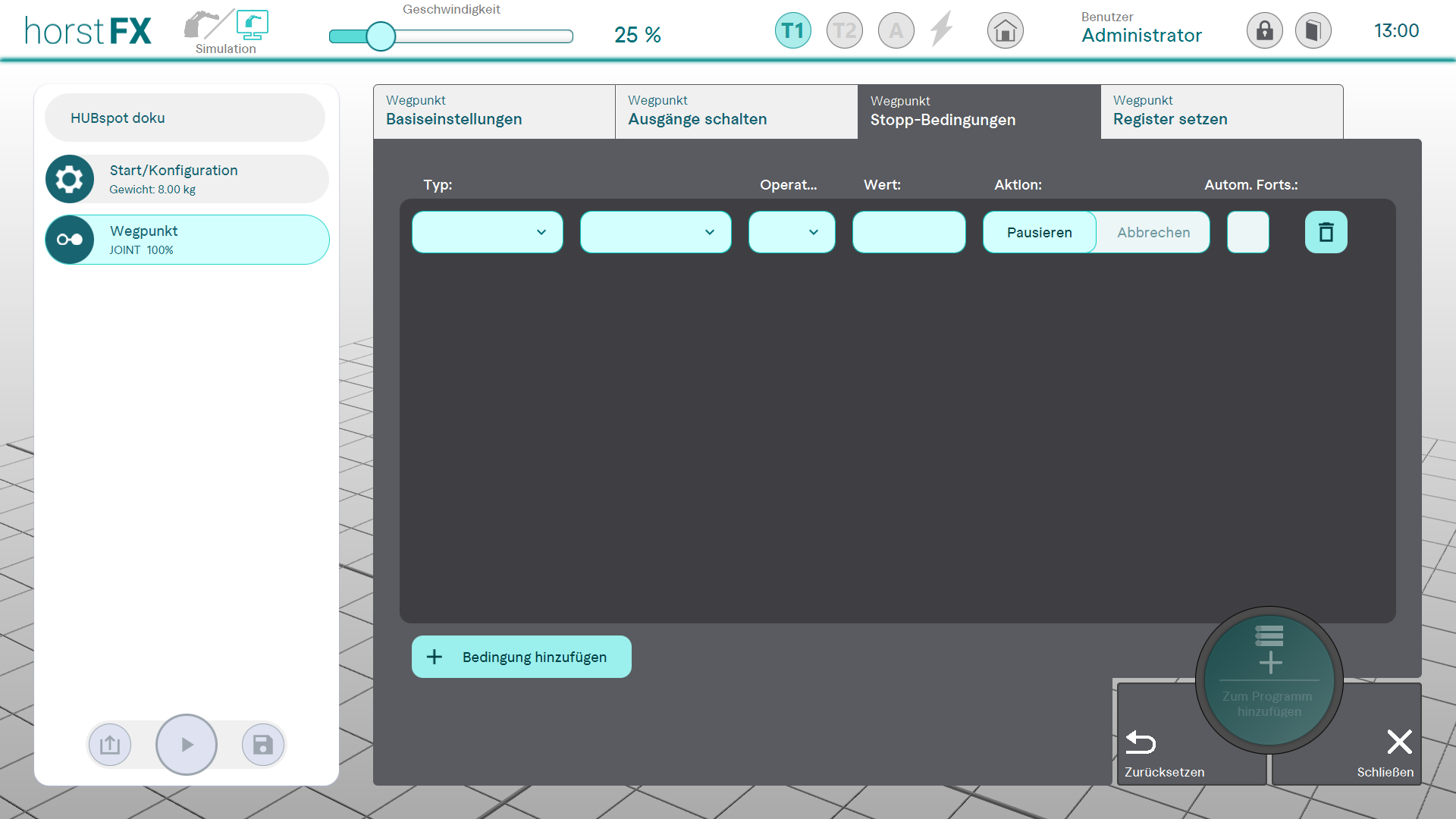
Stopp-Bedingungen
Durch Stopp-Bedingungen k�nnen Bewegungen zu einem Wegpunkt pausiert oder abgebrochen werden, sobald eine bestimmte Bedingung eintrifft. F�r jede Aktion Wegpunkt k�nnen beliebig viele Stopp-Bedingungen definiert werden.
Es gibt 3 Arten von Stopp-Bedingungen:
- Pausieren
Das Programm pausiert und es erscheint ein entsprechendes Pop-up. Das Pop-up kann nur best�tigt werden, wenn die Abbruchbedingung nicht mehr erf�llt ist. Danach f�hrt das Programm weiter. - Pausieren mit automatischen Fortsetzen
Wird der Haken in der Checkbox gesetzt, wird das Programm ohne die manuelle Best�tigung weiter fortgef�hrt. - Abbrechen
Die aktuelle Bewegung wird abgebrochen und es wird mit der n�chsten Bewegung fortgefahren.
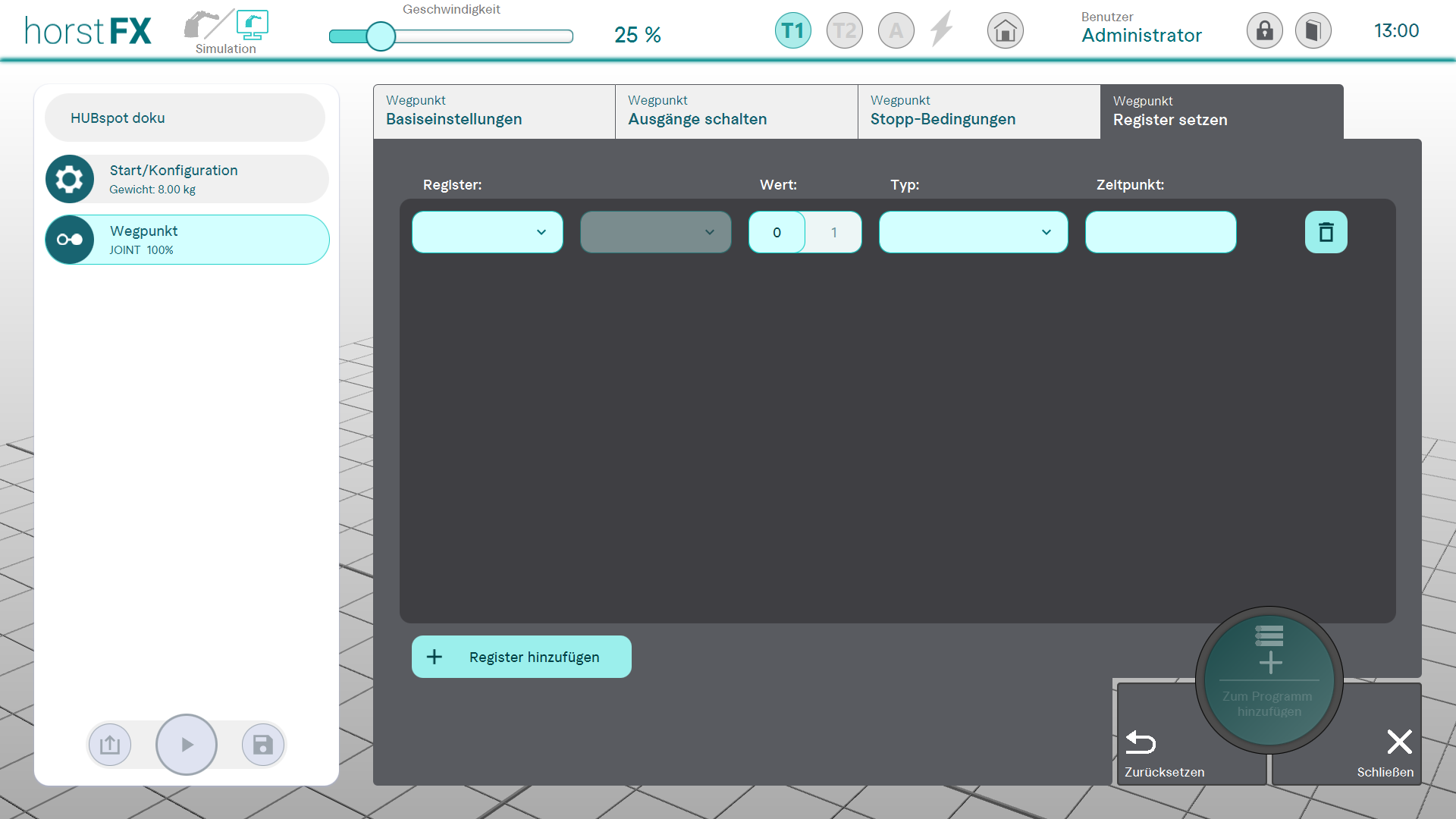
Register setzen
In diesem Teil der Einstellungen k�nnen w�hrend des Anfahrens eines Wegpunktes Register gesetzt werden. Das bedeutet, dass Werte zu einem bestimmten Zeitpunkt w�hrend der Bewegung des Roboters in ein Register gesetzt werden k�nnen. F�r jede Aktion Wegpunkt k�nnen beliebig viele Register gesetzt werden.
F�r das Setzen eines Registers gibt es zwei M�glichkeiten:
- Pfaddauer
Legt fest nach welcher prozentual vergangenen Zeit der Registerwert gesetzt wird. Die Zeit bezieht sich auf die komplette Bewegung inklusive Beschleunigen und Abbremsen des Roboters. - Zeitliche Verz�gerung
Legt fest nach wie vielen Millisekunden ab Beginn des Anfahrens des Wegpunktes der Registerwert gesetzt wird. Ist der Wert h�her als die komplette Bewegung an sich dauert, wird am Ende der Bewegung so lange gewartet, bis der zeitliche Wert erreicht ist und der Registerwert wird gesetzt.