Freies Fahren erm�glicht eine direkte Steuerung des Roboters ohne das Anfahren von bestimmten Punkten. Dabei gibt es mehrere M�glichkeiten.
Das Freie Fahren ist nur mithilfe des Zustimmtasters m�glich, unabh�ngig der aktivierten Benutzerrolle.
Initialisieren
Achtung: Die Sicherheitshalt-Funktion ist beim Initialisieren deaktiviert.
Die Initialisierung muss nach jedem Einschalten des Robotersystems durchgef�hrt werden, wenn die Stromzufuhr unterbrochen wurde.
Der Roboter kann entweder manuell oder auto-initialisiert werden. Sind Hindernisse in n�chster Umgebung empfiehlt sich die manuelle Initialisierung, um Kollisionen zu vermeiden.
Freies Fahren / Manuelle Steuerung
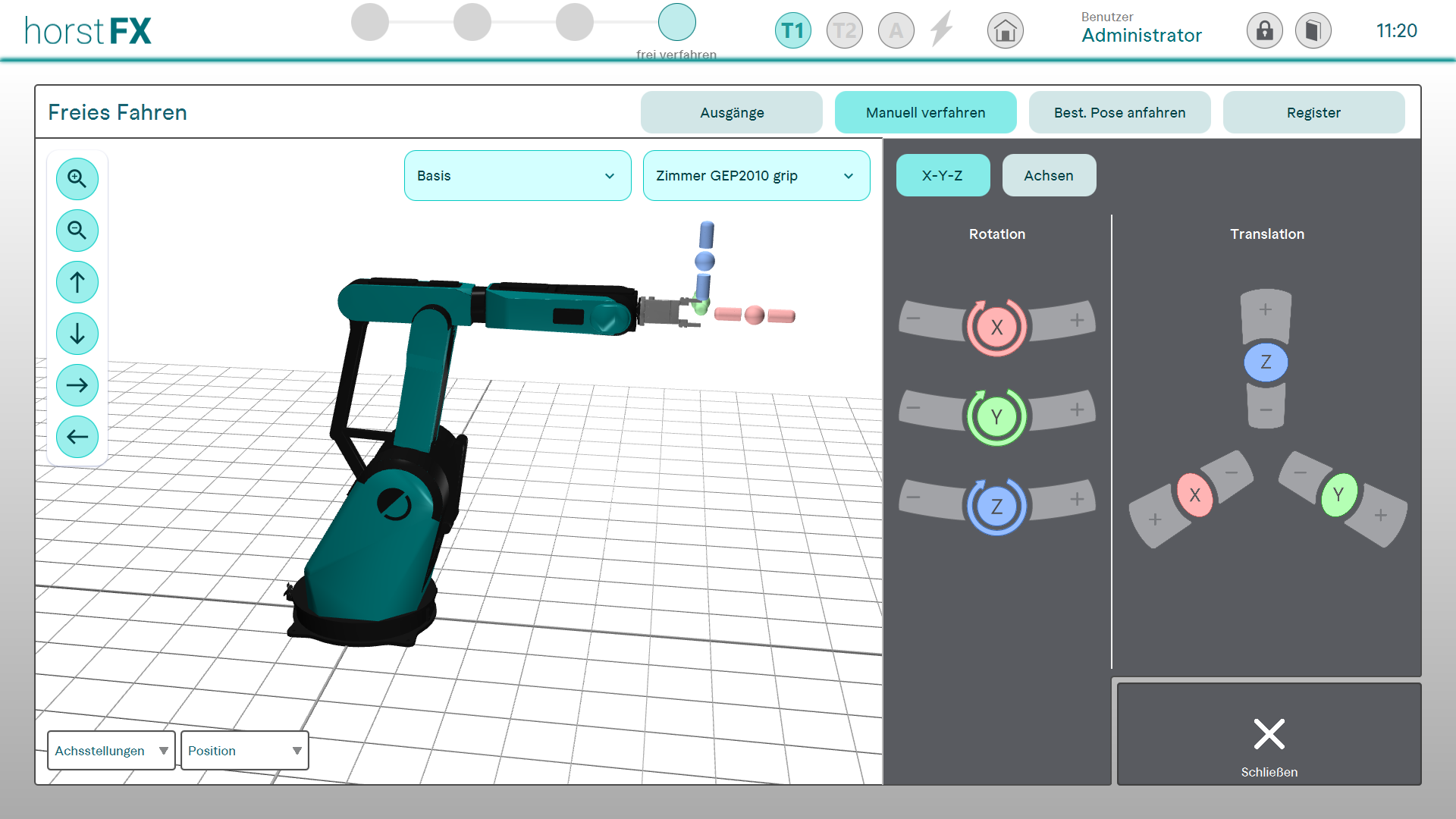
Bewegungen im Koordinatensystem
Rotation
Es kann um einzelne Achsen rotiert werden. Dabei bleibt der TCP immer an der selben Stelle, der Roboter rotiert um ihn herum.
Translation
Es k�nnen auch Linearbewegungen ausgef�hrt werden. Dabei bewegt sich der Roboter linear, sodass der TCP sich auf der ausgew�hlten Achse bewegt.
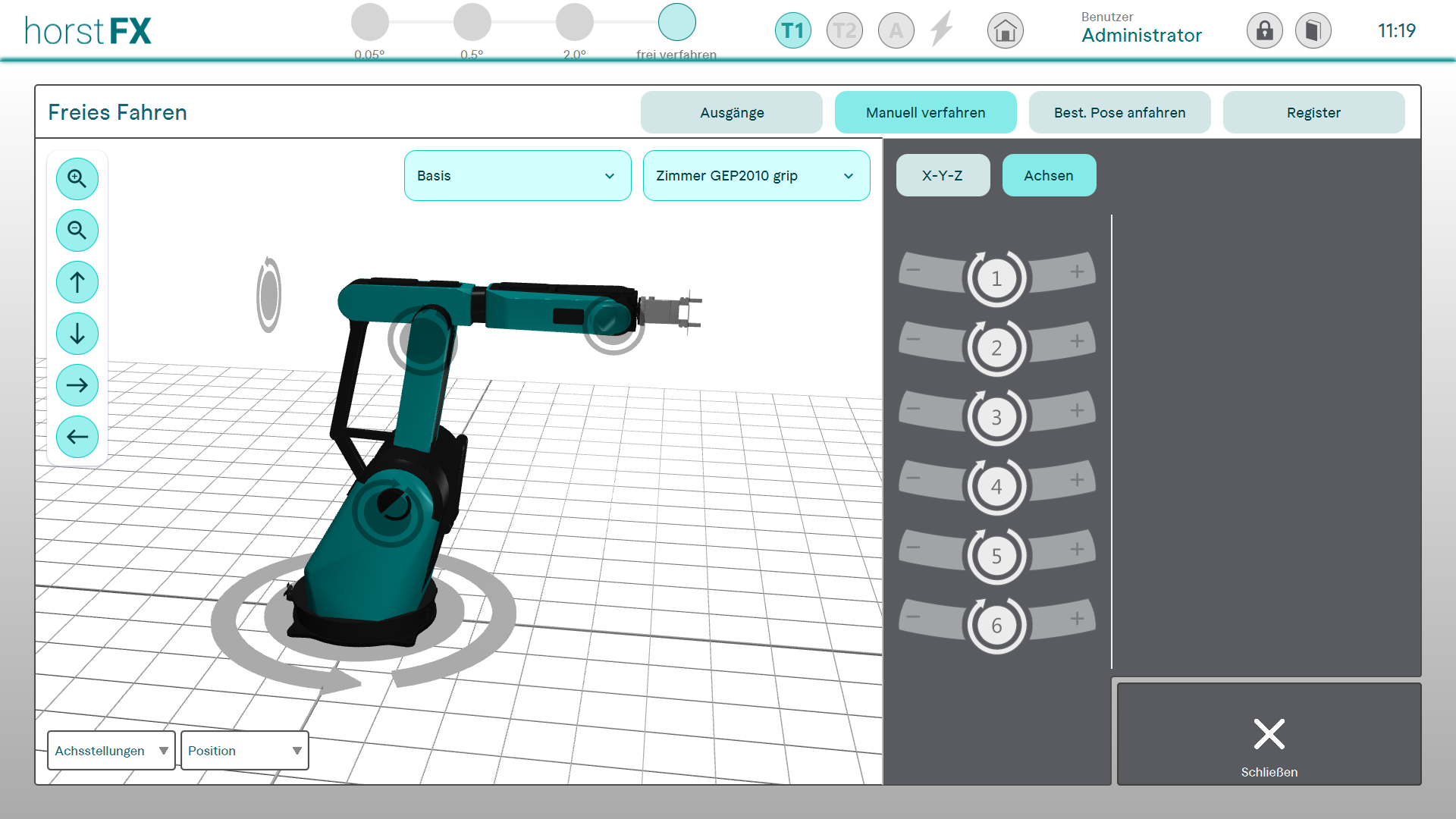
Bewegungen der einzelnen Achsen
Hier kann jede Achse einzeln ausgew�hlt werden und bewegt werden. Mehrere Achsen k�nnen nicht gleichzeitig bewegt werden.
Bestimmte Pose anfahren
Eine bestimmte Roboter-Pose kann entweder durch eine vorgegebene Orientierung (Bild 1) durch Koordinaten oder anhand einer Achse (Bild 2) des globalen Koordinatensystems definiert werden. Sobald die gew�nschte Pose durch die entsprechenden Werte definiert wurde, wird �ber das Netzmodell des Roboters die potentiellen Achstellungen angezeigt. Um diese Achskonfiguration tats�chlich anzufahren muss zun�chst auf "Start" gedr�ckt werden und anschlie�end auf "Anfahren". Der Button "Anfahren" muss gehalten werden, damit der Roboter sich in die entsprechende Pose bewegt. Hierbei m�ssen der automatische Bewegungsablauf und m�gliche Kollisionen beachtet werden.
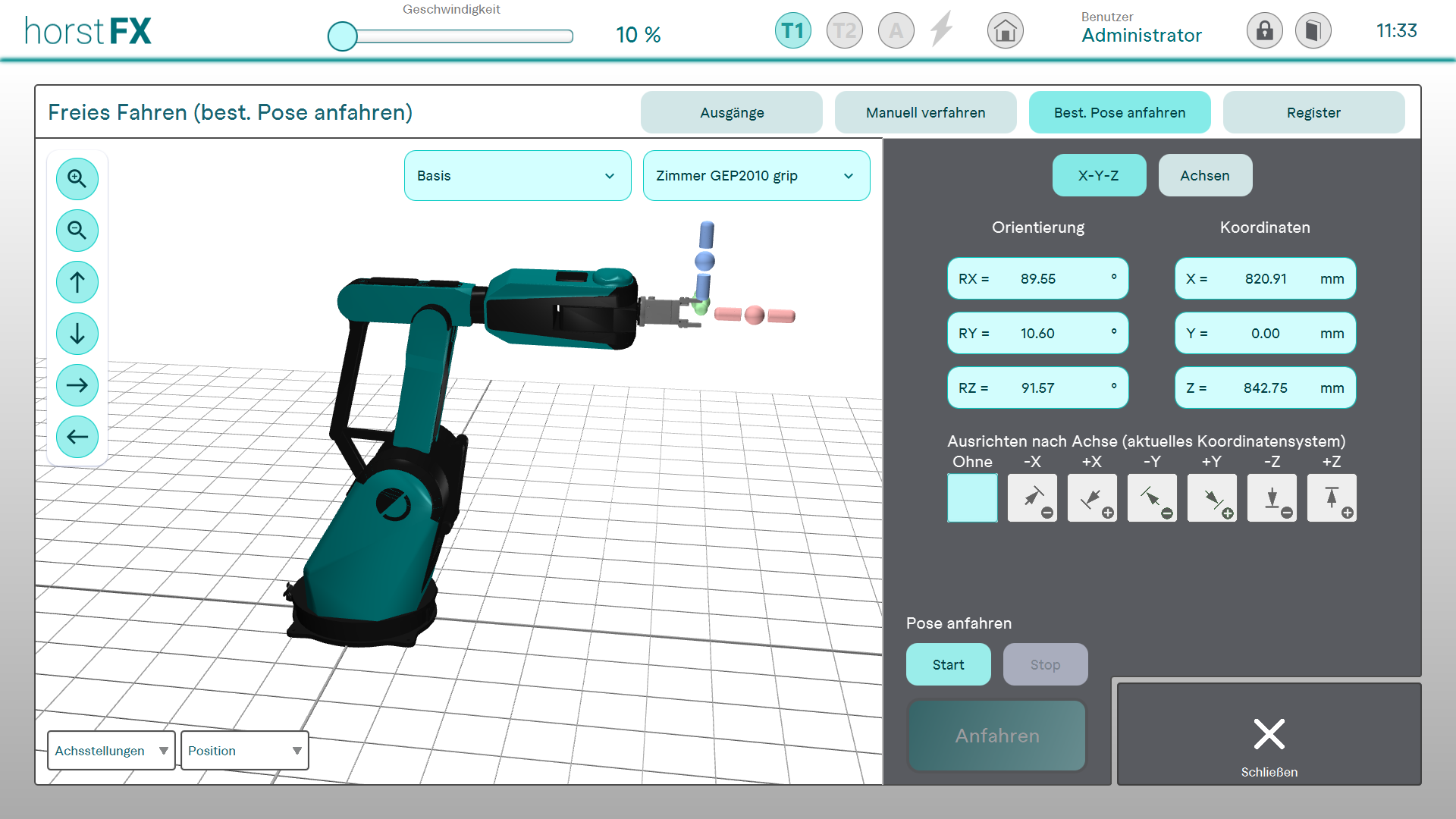
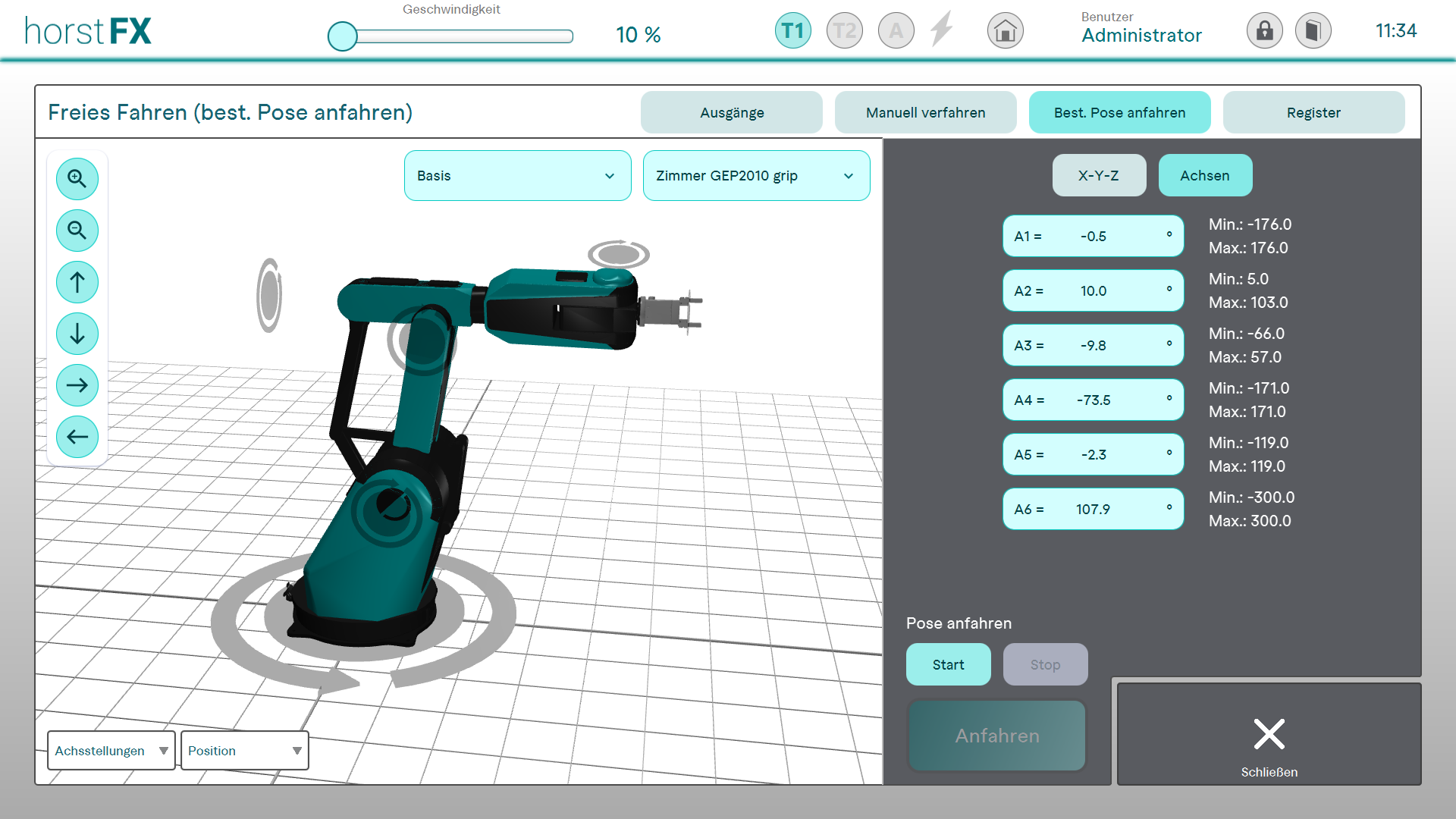
Bei beiden Methoden muss zuerst der Startbutton gedr�ckt werden und dann der 'Anfahren' Button so lange gedr�ckt werden bis die gew�nschte Stellung erreicht ist.
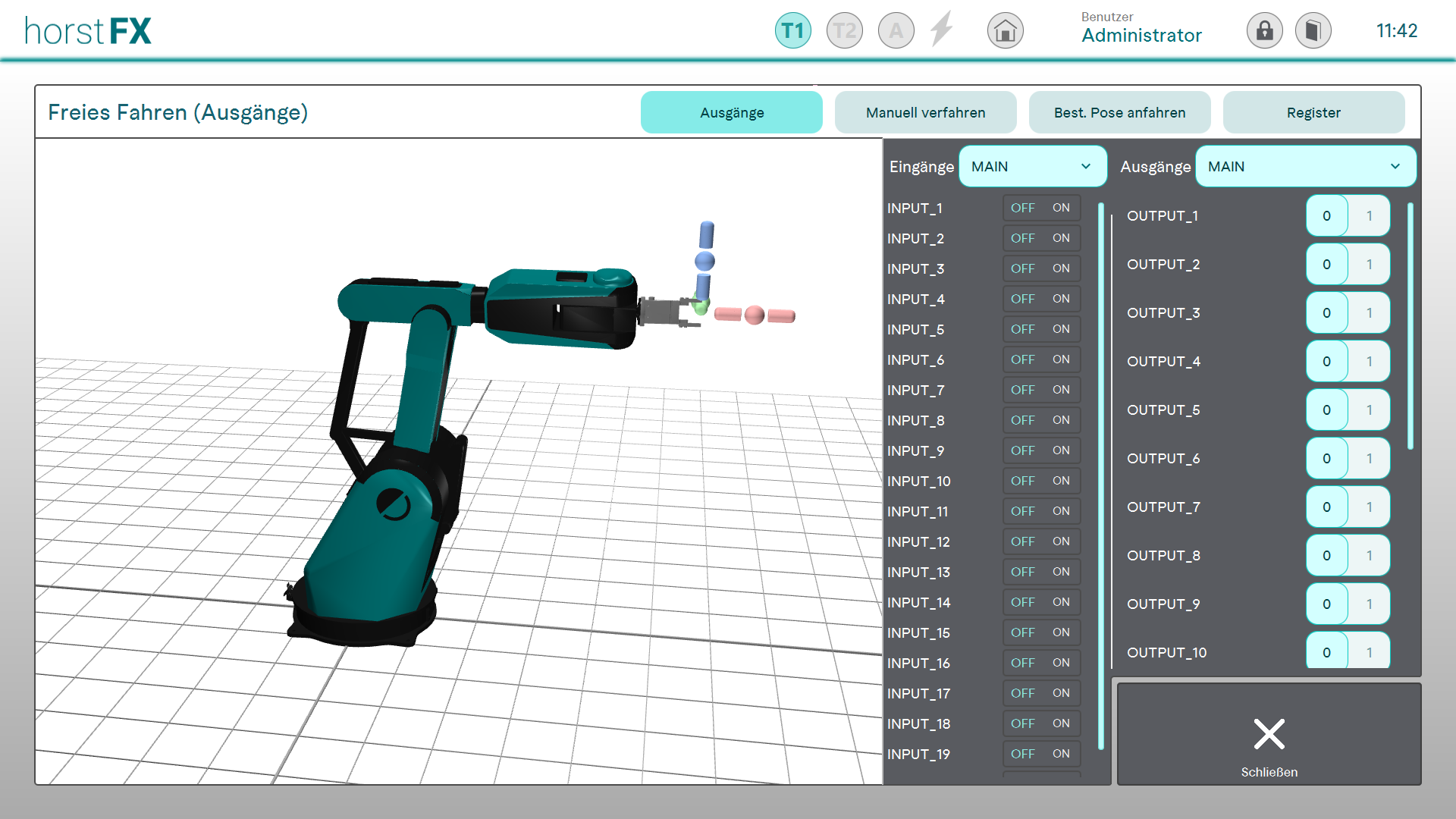
Ausg�nge
Hier kann sowohl der aktuelle Zustand aller Ein- und Ausg�nge eingesehen als auch der Zustand der Ausg�nge ver�ndert werden. Der Zustand der Eing�nge wird mit OFF oder ON signalisiert. Jeder Ausgang kann direkt �ber den entsprechenden Umschalt-Button 0/1 geschaltet werden. So k�nnen z. B. Greifer manuell ge�ffnet oder geschlossen werden.
Register
Die hier aufgef�hrten Eintr�ge zeigen nur eine bestimmte Auswahl der wichtigsten Register, die �ber Profinet und Modbus adressiert werden k�nnen.
Die Eintr�ge werden in diesem Men� nur angezeigt und k�nnen nicht ver�ndert werden.
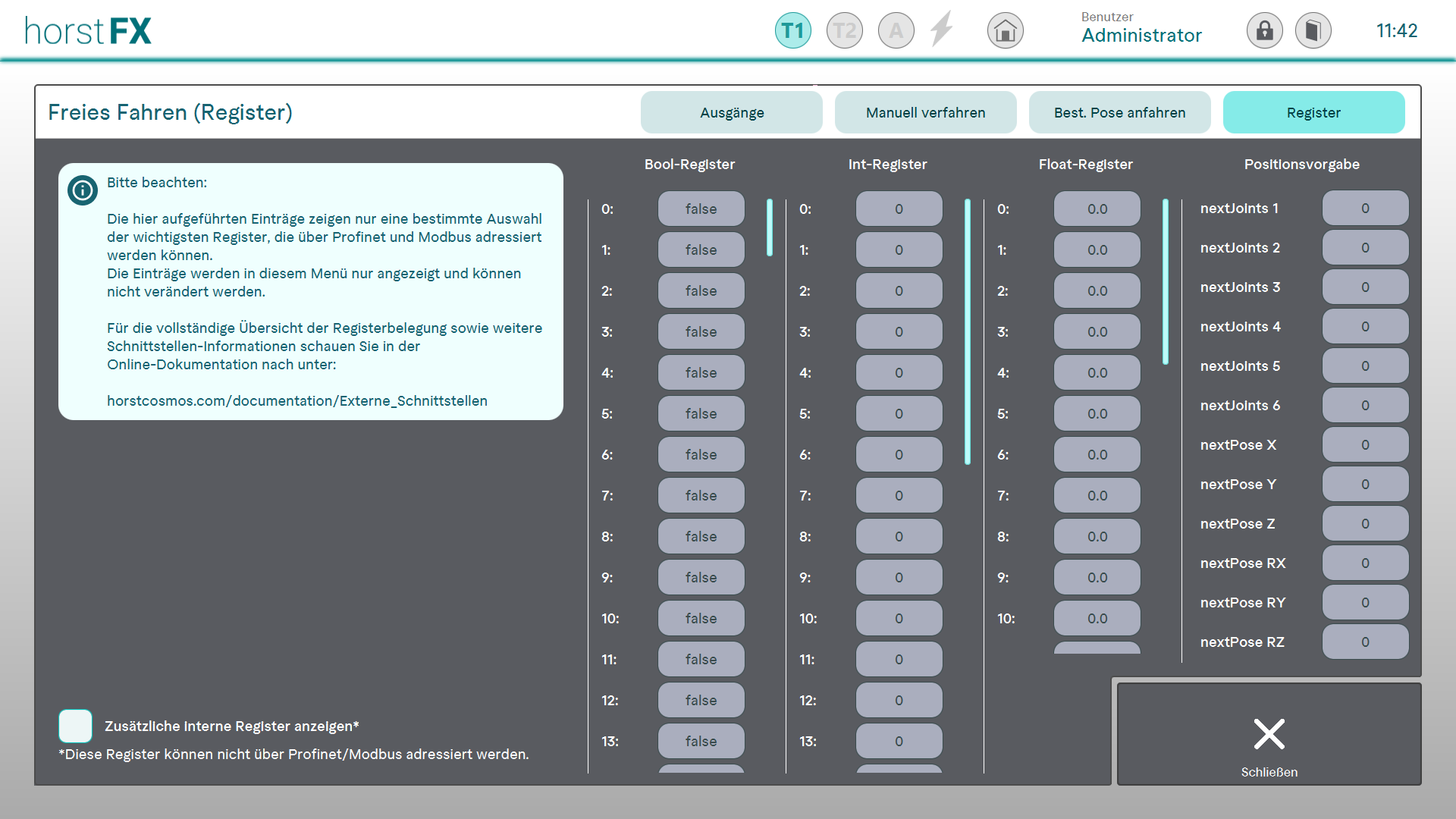 �ber das entsprechende Kontrollk�stchen (2) besteht die M�glichkeit, zus�tzliche interne Register anzuzeigen.
�ber das entsprechende Kontrollk�stchen (2) besteht die M�glichkeit, zus�tzliche interne Register anzuzeigen.