Im Aktionsfenster Start/Konfiguration k�nnen programmweite Einstellungen getroffen werden.
Reiter 1 - Tools und Koordinatensysteme
Hier k�nnen beliebig viele erstellte Tools und Koordinatensysteme dem Programm hinzugef�gt werden, auf welche dann bei den entsprechenden Aktionen zugegriffen werden kann.
Das erste Tool hat eine Sonderrolle, da das Programm immer mit diesem Tool gestartet wird. Das hei�t, dass Wegpunkte, die kein festes Tool hinterlegt haben, solange mit diesem Tool angefahren werden, bis �ber die Aktion Tool wechseln ein anderes Tool als aktives Tool definiert wird. Alle hier definierten Tools k�nnen an Wegpunkten hinterlegt werden.
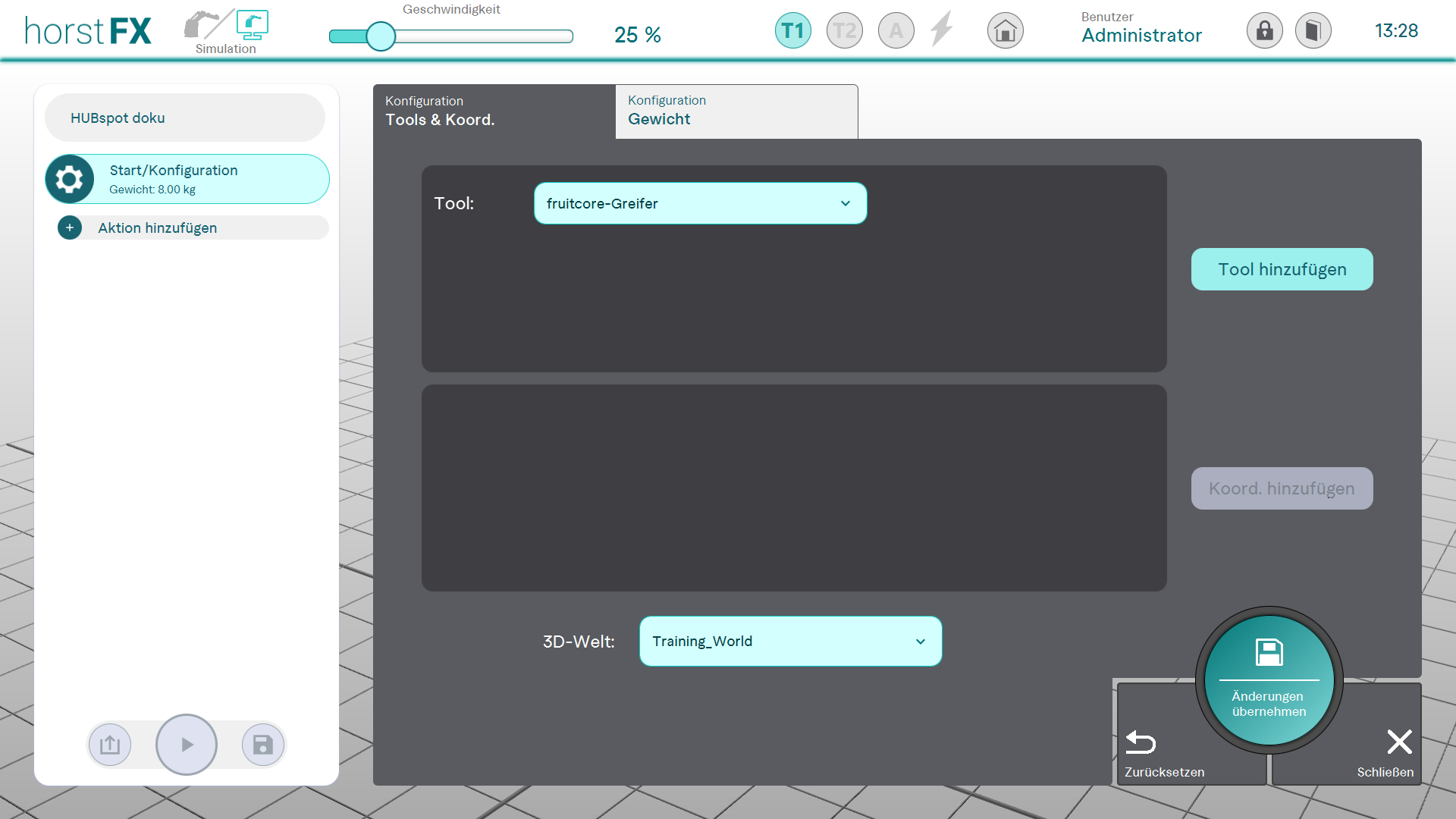
Au�erdem kann die 3D-Welt des Programms festgelegt werden
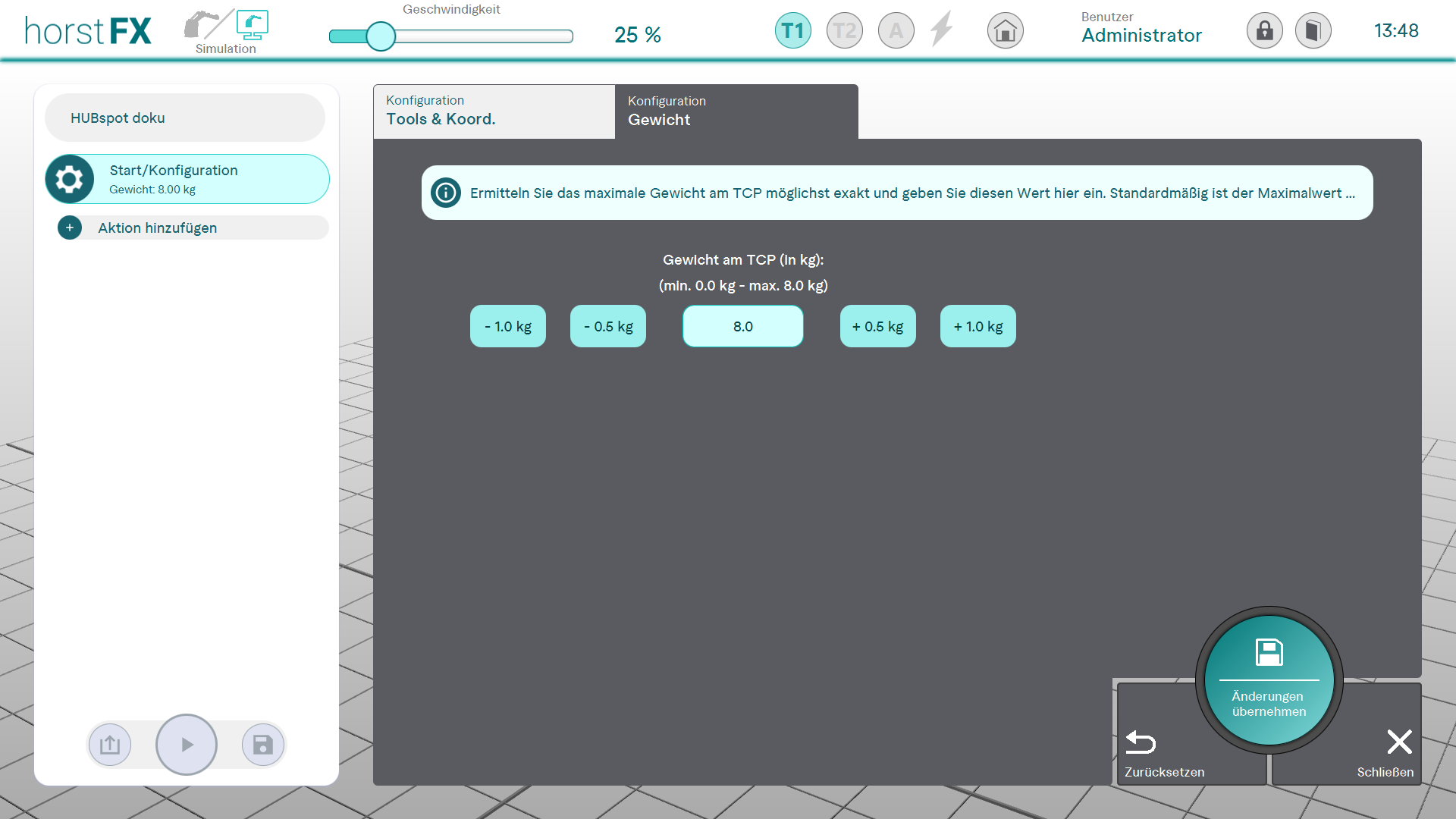
Reiter 2 - Gewicht
Das hier konfigurierte Gewicht am Roboterflansch (Werkzeug + Werkst�ck) gilt programmweit f�r alle Aktionen Wegpunkt und Relativer Wegpunkt, es sei denn, es wird von einer Aktion Gewicht �ndern �berschrieben oder in einer Aktion Wegpunkt oder Relativer Wegpunkt ist ein separates Gewicht konfiguriert.
ACHTUNG!
Das maximale Gewicht am TCP sollte m�glichst exakt ermittelt hier eingestellt werden. Bei zu geringer Gewichtsangabe wird der Roboter au�erhalb der Spezifikation betrieben. Dies kann zu erh�htem Verschlei� und eventuell zu Schrittverlusten und somit zur Sch�digung des Systems f�hren. Das Betreiben des Roboters au�erhalb der Spezifikation f�hrt zum Verlust der Gew�hrleistung.