Tools
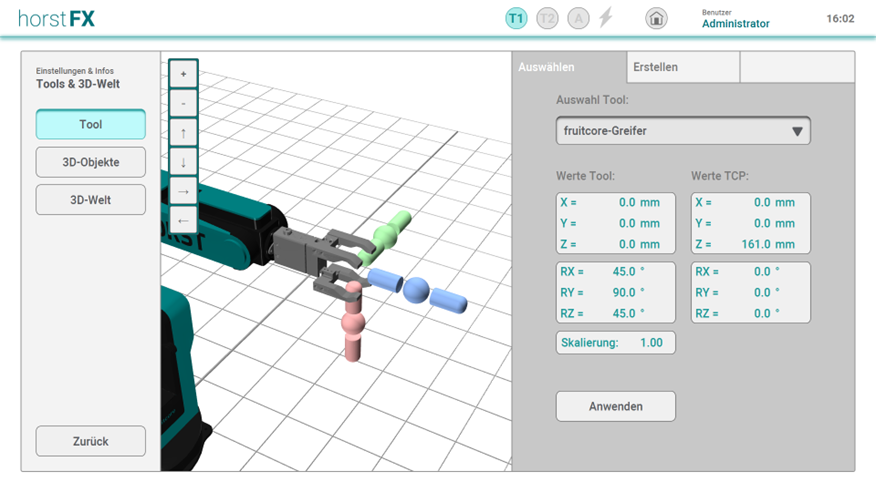
Im Reiter Ausw�hlen kann zwischen bereits vorhandenen oder erstellten Tools ausgew�hlt werden. Diese werden dann standardm��ig f�r neue Programme ausgew�hlt.
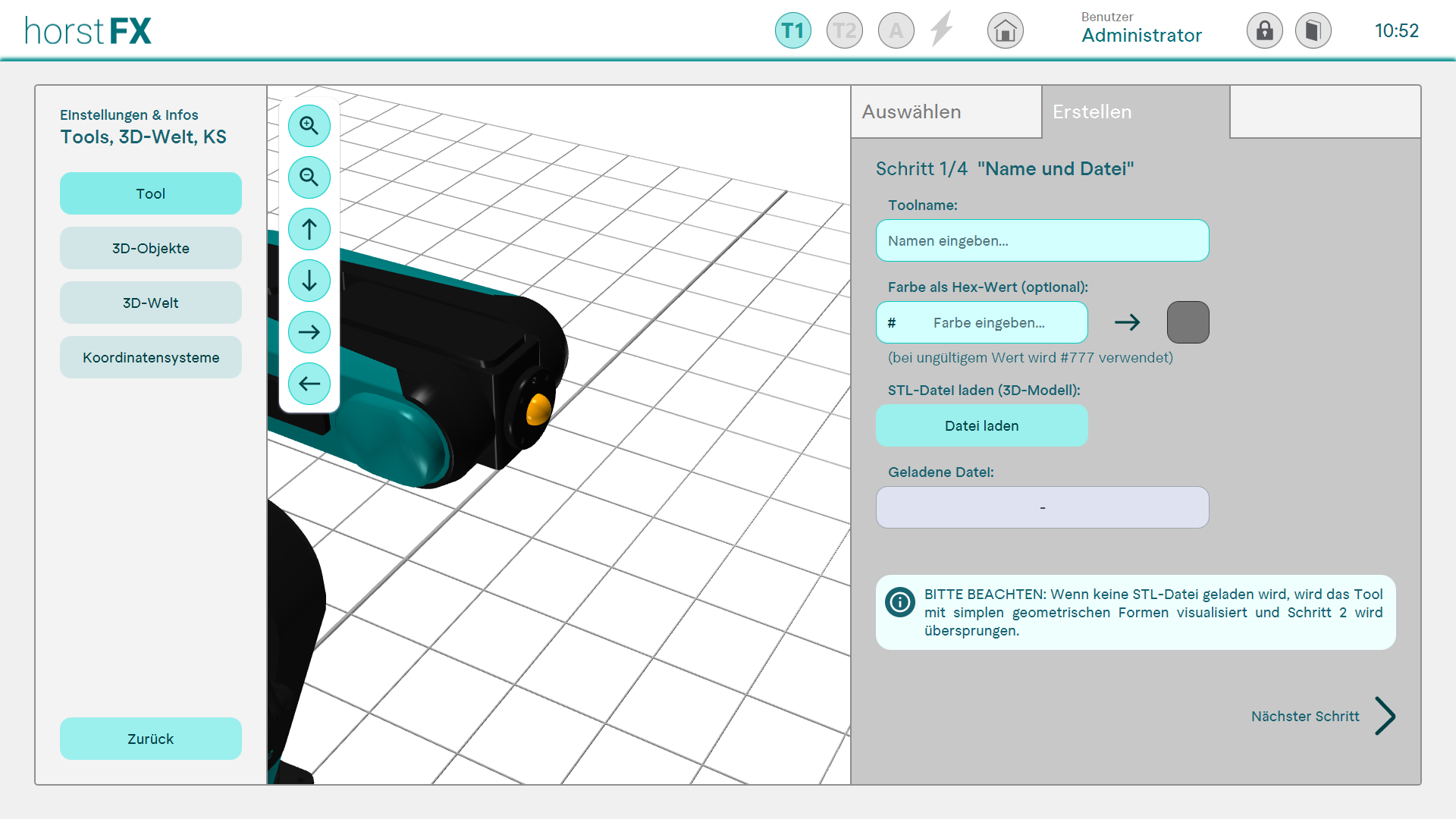
Tools erstellen
Um ein neues Tool zu erstellen, ist es nicht zwingend erforderlich eine STL-Datei zu importieren und zu laden. Wenn in diesem Schritt keine STL-Datei geladen wird, wird das Tool mit simplen geometrischen Formen visualisiert und Schritt 2 wird �bersprungen.
Nach der Benennung und dem Import der STL-Datei, kann das importierte Tool hinsichtlich Offset & Orientierung angepasst werden.
Im n�chsten Schritt kann der TCP und dessen Orientierung angepasst werden.
In der �bersicht kann das Tool final erstellt werden.
3D-Objekte
3D-Objekte k�nnen nur mithilfe von stl-Dateien erstellt werden.
 Nach dem Upload der Datei kann das Objekt durch Definition des Offset und der Orientierung im Raum platziert werden.
Nach dem Upload der Datei kann das Objekt durch Definition des Offset und der Orientierung im Raum platziert werden.
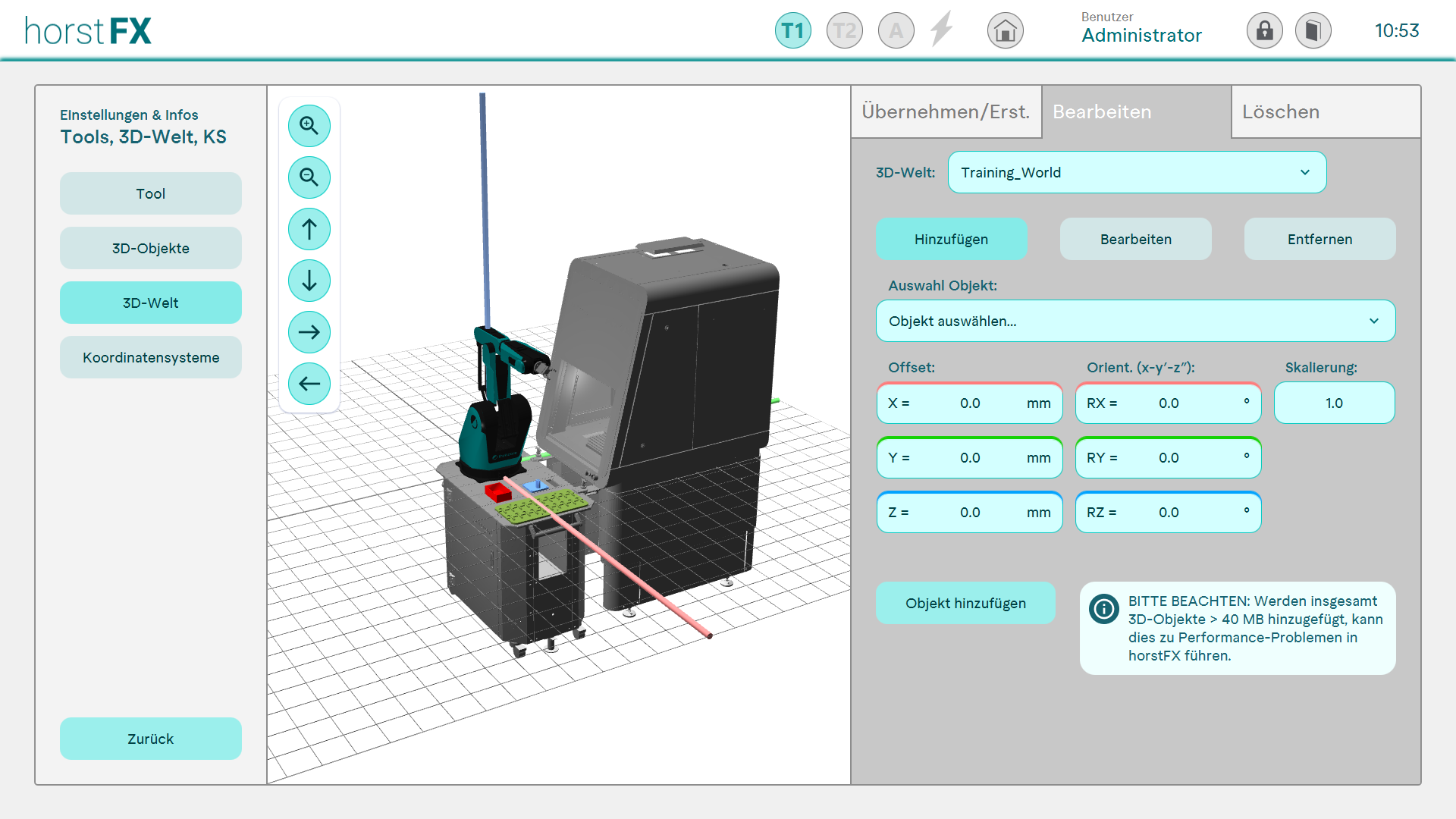
3D-Welt
In einer 3D-Welt k�nnen mehrere zuvor importierte 3D-Objekte beliebig angeordnet und als eine Konfiguration gespeichert werden. Somit kann die Arbeitsumgebung des Roboters abgebildet werden.
Koordinatensysteme
Es k�nnen benutzerdefinierte Koordinatensysteme erstellt werden, welche dann in den einzelnen Aktionen verwendet werden k�nnen. Sinnvoll bei z.B. schr�gen Palettiervorg�ngen.
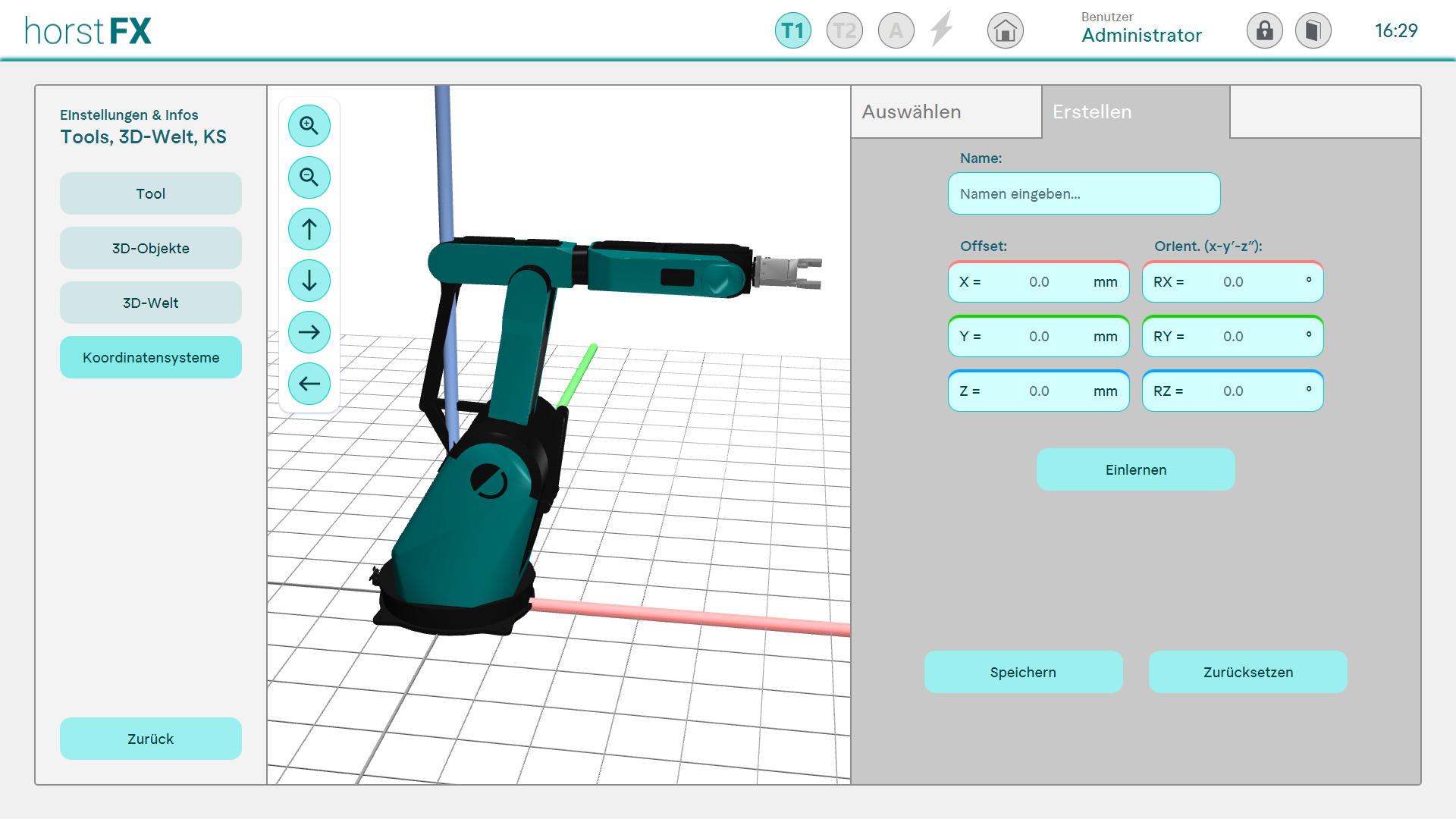
Das Erstellen eines Koordinatensystems erfolgt �ber die Angabe eines Offsets und einer Orientierung. Diese kann angegeben oder �ber das Anfahren von Punkten eingelernt werden. Nach der Erstellung ist eine Anpassung m�glich.