Basiseinstellungen und Zielpunkt definieren
Eine Aktion Relativer Wegpunkt stellt die Definition einer Bewegung des Roboters in eine bestimmte Stellung bzw. zu einem bestimmten Zielpunkt dar. Der Zielpunkt wird jedoch relativ zur vorherigen Stellung des Roboters definiert.
Da deswegen kein absoluter Zielpunkt bekannt ist und somit auch nicht die Stellung des Roboters am Ende der relativen Bewegung kann es passieren, dass der Roboter in eine ungültige Stellung fahren würde oder die Bahn zum Zielpunkt nicht möglich ist. In einem solchen Fall wird die Programmausführung mit einem entsprechenden Hinweis abgebrochen.
Die Konfiguration der Aktion Relativer Wegpunkt erfolgt identisch zur Konfiguration der Aktion Wegpunkt.
Unterschied zur Aktion Wegpunkt:
Bei Verwendung von Variablen muss zusätzlich noch der genaue Typ der Zielposition-Variable angegeben werden. Diese Information wird bei der Zuweisung zu einer Zielposition-Variable nicht hinterlegt, was eine flexiblere Verwendung von Zielposition-Variablen ermöglicht.
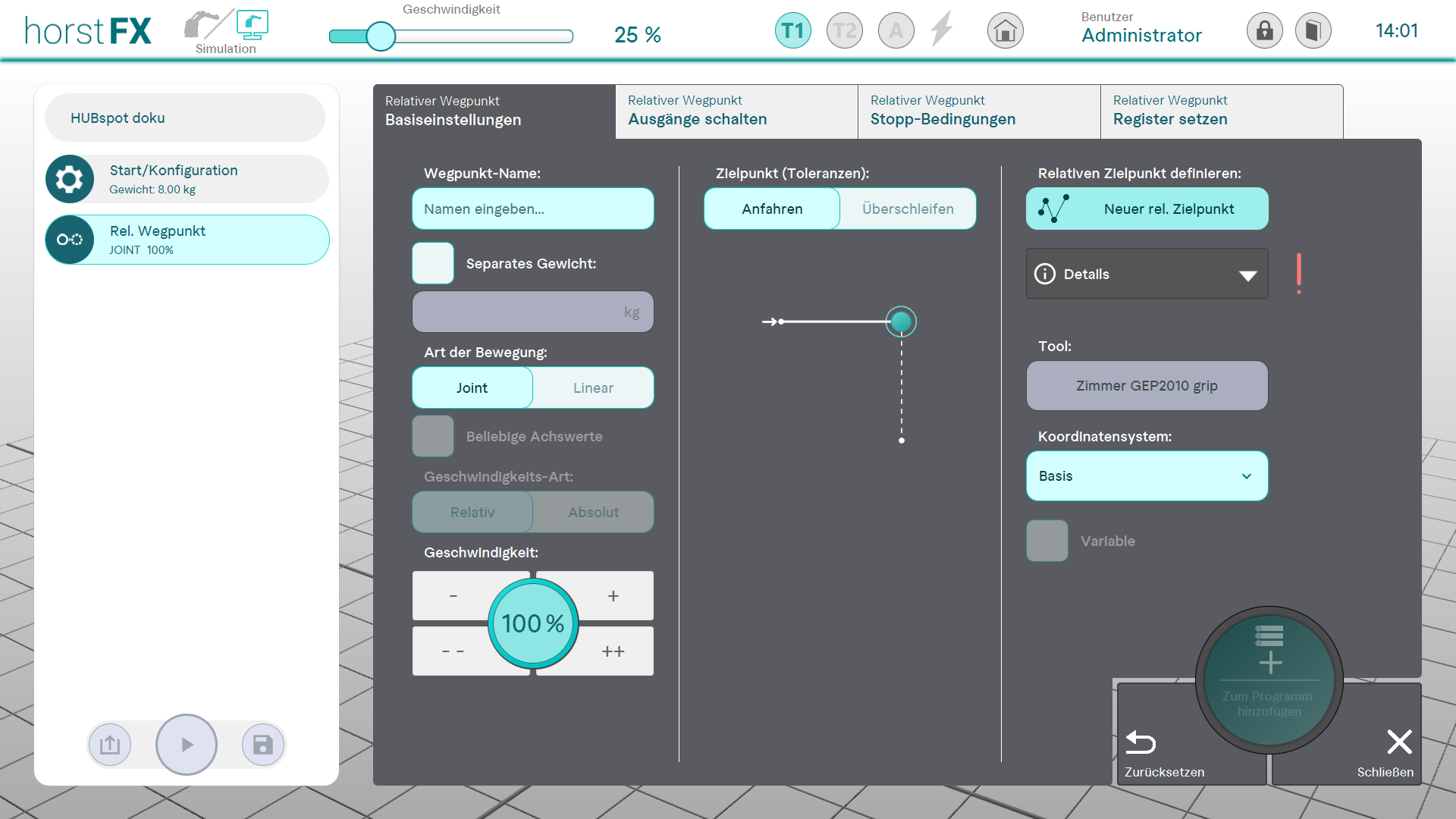
Der Zielpunkt definiert die Position des TCP (Tool Center Point) im globalen Koordinatensystem und dessen Orientierung. Jeder relative Wegpunkt benötigt einen Zielpunkt, daher kann die Aktion Relativer Wegpunkt erst gespeichert werden, sobald ein Zielpunkt definiert ist.
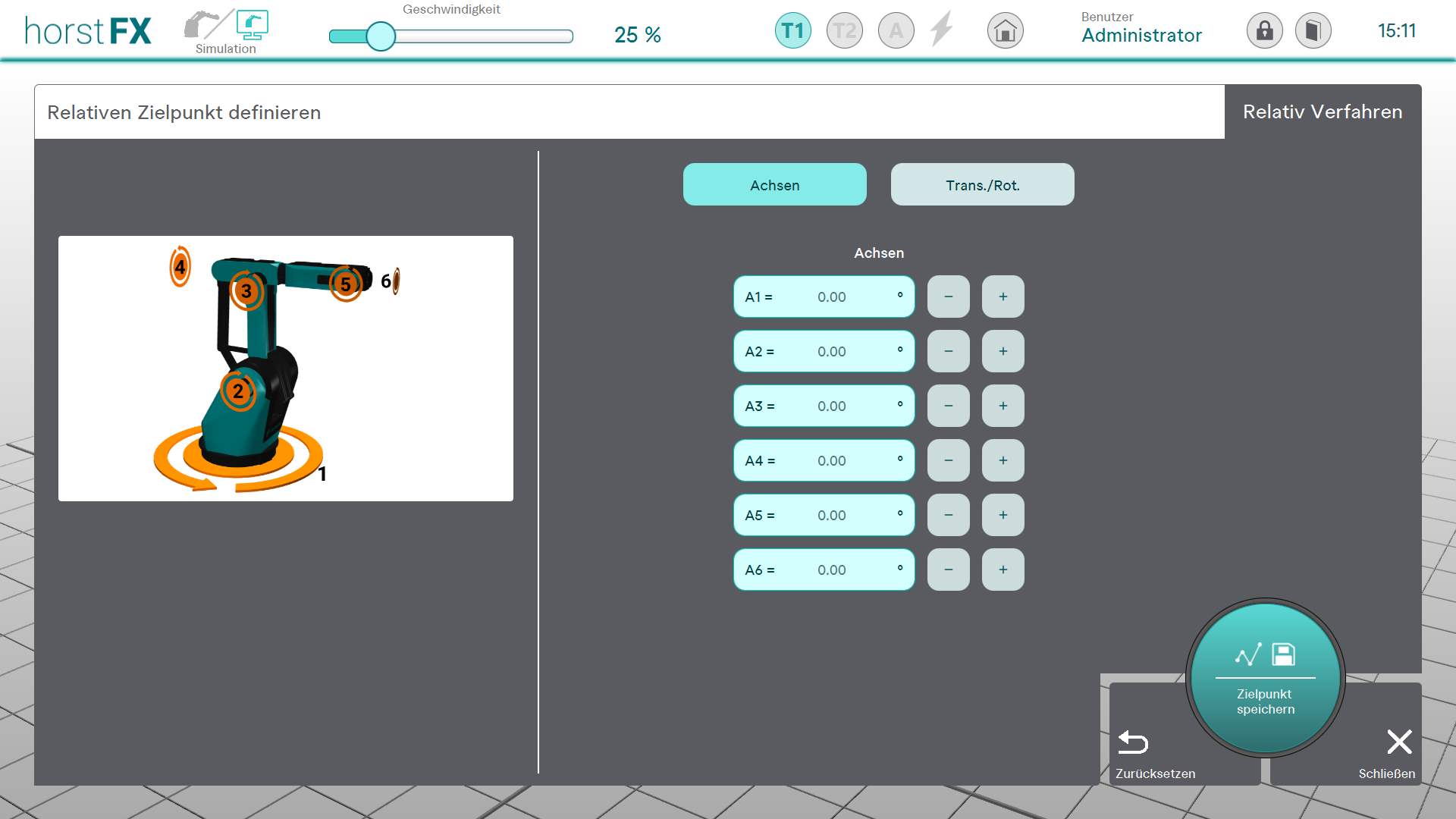
Es gibt drei Möglichkeiten den relativen Zielpunkt zu definieren.
Roboterachsen
Für jede Achse kann ein Delta-Wert eingestellt werden. Bei der Programmausführung werden diese Delta-Werte auf die Achswerte der vorherigen Stellung des Roboters addiert.
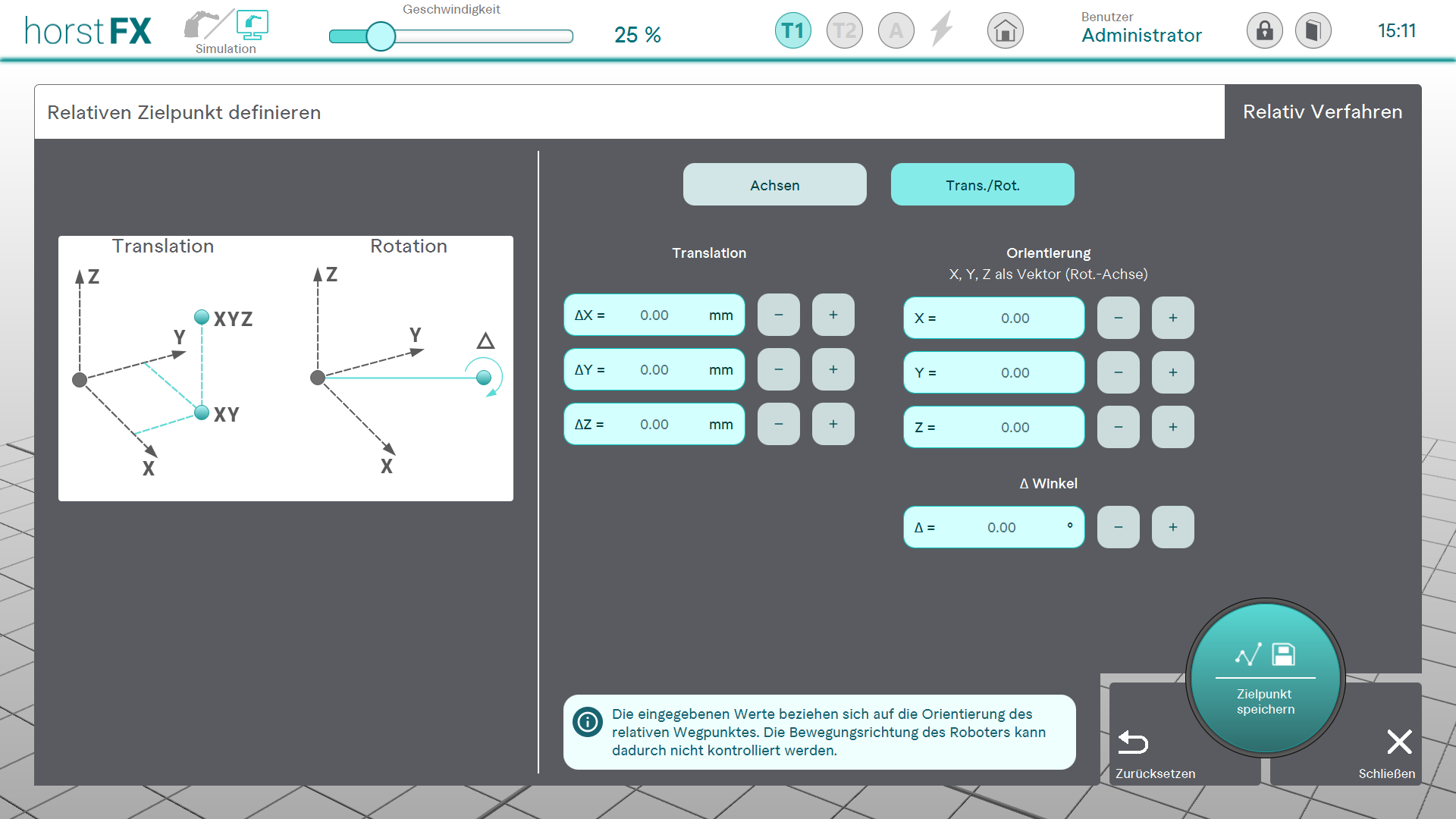
Translation und Rotation
Translation und Rotation können sowohl einzeln als auch in Kombination definiert werden. Als Bezugs-Koordinatensystem kann sowohl das Basis-Koordinatensystem als auch das TCP-Koordinatensystem ausgewählt werden.
Für die Koordinatenwerte des TCP (Tool Center Point) können Delta-Werte eingestellt werden. Bei der Programmausführung werden diese Delta-Werte auf die Koordinatenwerte des TCP (Tool Center Point) der vorherigen Stellung des Roboters addiert.
Die Rotationsachse wird durch einen Vektor bestimmt und für den Winkelwert kann ein Delta-Wert eingestellt werden. Bei der Programmausführung wird die Rotationsachse um den Winkelwert rotiert.